Wirtualne sterowanie robotami wykorzystuje środowisko symulacji automatyzacji zamiast fizycznego systemu robotycznego do testowania zachowania z zastosowaniem rzeczywistego systemu sterowania. Wirtualne sterowanie robotami odbywa się przed ich wdrożeniem i uruchomieniem w hali produkcyjnej. Jest to jedna z szeregu funkcji oprogramowania do symulacji pracy robotów.
Wirtualne sterowanie robotami bazuje na cyfrowym bliźniaku, który jest interaktywną, wirtualną reprezentacją systemu robotycznego i otaczającego go środowiska produkcji, do symulowania planowanych i zaprogramowanych zadań wykonywanych przez robota. Dzięki temu inżynierowie produkcji mogą programować roboty w trybie offline i testowanie je bez zakłócania bieżących procesów produkcji.
Wirtualne sterowanie robotami wykorzystuje środowisko symulacji automatyzacji zamiast fizycznego systemu robotycznego do testowania zachowania z zastosowaniem rzeczywistego systemu sterowania, przed wdrożeniem i uruchomieniem w hali produkcyjnej. Jest to jedna z szeregu funkcji oprogramowania do symulacji pracy robotów.
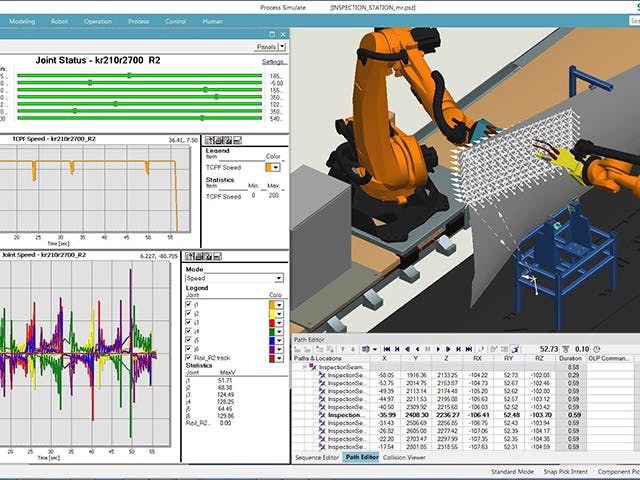
Powiązane produkty: Tecnomatix Process Simulate